



一、课程背景
无人驾驶近几年在国内国外都特别火,在国内7月4日的百度 AI 开发者大会上,百度宣布全球首款 L4 级量产自动驾驶巴士‘阿波龙’量产下线(底层架构是百度的Apollo自动驾驶系统),今年11月,百度与海淀区政府利用 AI 技术把海淀公园改造为全球首个 AI 公园,从而无门槛体验阿波龙无人驾驶小巴车。此外,百度还将与一汽红旗共同打造中国首款 L4 级自动驾驶量产乘用车。

再观国外,今年8月,Google自动驾驶公司Waymo的实地自动驾驶里程突破 1000 万英里,12月,Waymo 又推出了一款商用自动驾驶车——Waymo One。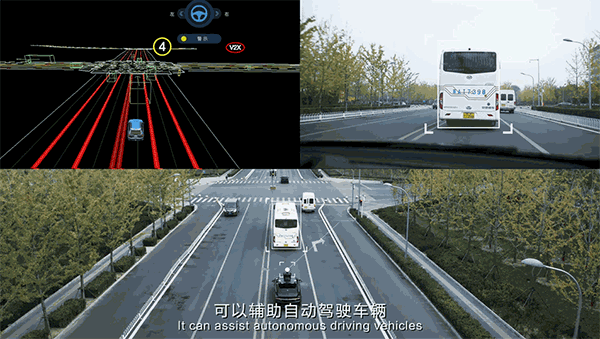
自动驾驶技术的发展目前最大的瓶颈不是传感器的昂贵,不是产业发展不完善,更不是公司投入不足,而是研发人才的极度匮乏。目前我国汽车从业人员达到360万,但其中技术人才不到50万,占比不到15%,另外,从自动驾驶专业人才年薪动辄几百万上千万,就可以知道人才有多紧缺。
我们需要更多的工程师和科学家进入这一领域,将现有的技术进行整合落地。但是如何帮助开发者们进入这一新兴领域成了业界非常关注的事情。
二、L4级技术
为让大家对无人驾驶有个全面基本的了解,本课程的授课老师盛老师特给大家介绍下L4级技术。
总的说来,无人驾驶系统主要由三部分组成:算法端、车端和云端。其中算法端包括传感器、感知和决策等智能关键步骤的算法;车端包括机器人操作系统、各种计算硬件和车辆底盘硬件等;云端包括数据挖掘、仿真模拟、高精地图以及深度学习训练等等。
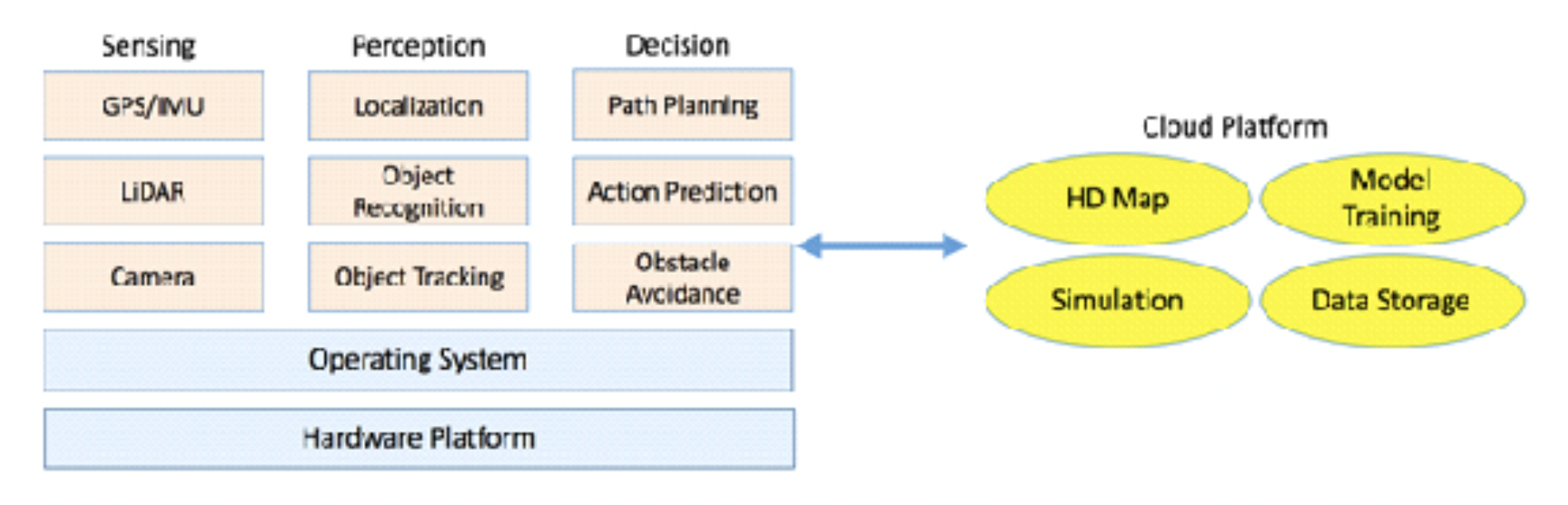
相当于无人驾驶要解决4 个关键问题:我在哪?我周围有什么?接下来会发生什么?我应该怎么做?
2.1 我在哪?
定位问题是无人车首先要解决的问题,只有明白自身的位置才能最优的开往目的地。定位需要依靠一种称为高精地图的技术,该技术会将无人车要走的所有静态环境进行描述,包括车道线、行人斑马线、标志牌等等。这些静态信息可以提供交通信号的关键信息,也会作为定位方案的锚定物对自身的位置进行校准,比如通过摄像头看到距离左边标志牌的距离是2.5m,那么在地图中知道了标志牌的坐标也就知道了自身车辆的坐标。同时,还会依靠GPS/IMU等全局设备来定位自身位置,不过这可比我们目前智能手机里的GPS精度要求高很多,通过差分融合技术可以达到厘米级精度。
2.2 我周围有什么?
有了定位后,无人车的感知系统将通过传感器和人工智能算法将周围的障碍物位置、大小、状态、类别等标识出来。目前主流L4级别的传感器包括GPS/IMU、LIDAR、Camera、Radar等,LIDAR、Camera和Radar都是用于感知周围障碍物的主要传感器,分别在不同环境下能够有不同的优势。这些信息犹如人类驾驶员的眼睛一样看到周围动态环境物体,并将其识别出来,而无人车会利用自己多传感器和计算效率达到远超人类的水平,比如精准识别车辆后方任何物体、同时关注左右两边的车辆状态,在黑暗状态时可以通过激光雷达精准识别。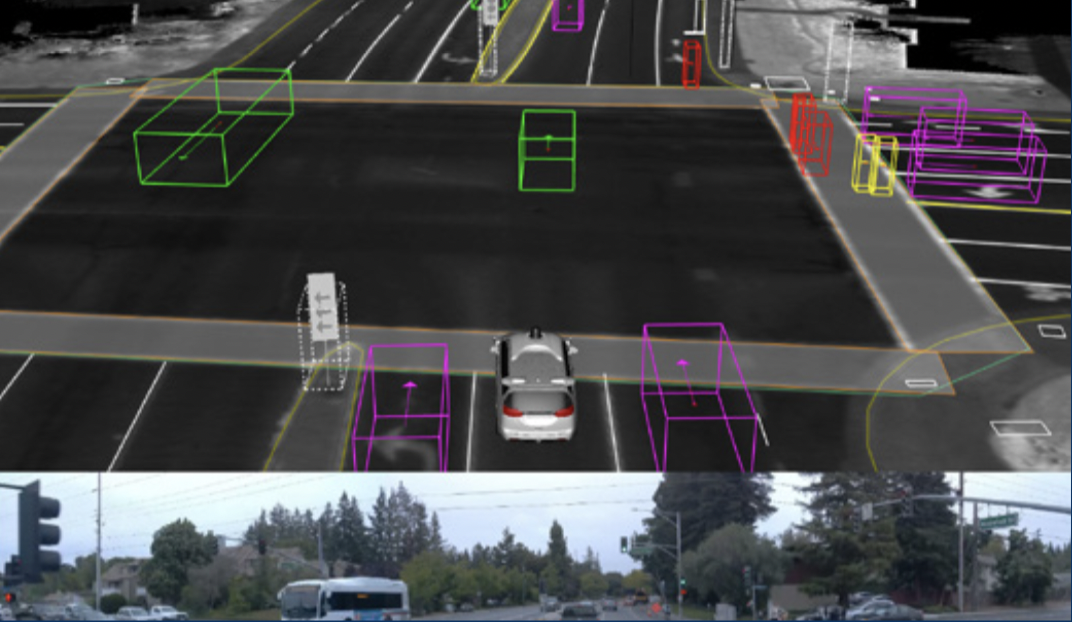
有了定位后,无人车的感知系统将通过传感器和人工智能算法将周围的障碍物位置、大小、状态、类别等标识出来。目前主流L4级别的传感器包括GPS/IMU、LIDAR、Camera、Radar等,LIDAR、Camera和Radar都是用于感知周围障碍物的主要传感器,分别在不同环境下能够有不同的优势。这些信息犹如人类驾驶员的眼睛一样看到周围动态环境物体,并将其识别出来,而无人车会利用自己多传感器和计算效率达到远超人类的水平,比如精准识别车辆后方任何物体、同时关注左右两边的车辆状态,在黑暗状态时可以通过激光雷达精准识别。
2.3 接下来会发生什么?
无人车知道周围动态物体后,还需要能够尽可能的预测这些物体的走向,包括行为预测和速度预测。例如这个车是要左转还是直行,这辆车会不会闯红灯等等,汇入车流时速度是多少。这些问题都将决定我们无人车后续应该怎么走,如何避免碰撞发生危险。当然由于人的主观意志具有很多不确定性,在人类司机和自动驾驶司机混合的道路上,人工智能程序还需要学习人类的行为习惯和约定俗成的礼让方式,这些都大大增加了无人车的难度。
无人车知道周围动态物体后,还需要能够尽可能的预测这些物体的走向,包括行为预测和速度预测。例如这个车是要左转还是直行,这辆车会不会闯红灯等等,汇入车流时速度是多少。这些问题都将决定我们无人车后续应该怎么走,如何避免碰撞发生危险。当然由于人的主观意志具有很多不确定性,在人类司机和自动驾驶司机混合的道路上,人工智能程序还需要学习人类的行为习惯和约定俗成的礼让方式,这些都大大增加了无人车的难度。

2.4 我应该怎么做?
最后一步就是根据上述信息综合来选择一条最适合无人车的道路,如同人类的大脑一样对车辆最终的行为负责,选择最合适的方式达到目的地。这需要考虑行车的体感、安全和快捷等因素,通过最优化算法、搜索算法、蒙特卡洛树采样等多种算法来得到未来的驾驶行为,也有通过模仿优秀老司机的驾驶行为等方式来提升驾驶性能等等。
最后一步就是根据上述信息综合来选择一条最适合无人车的道路,如同人类的大脑一样对车辆最终的行为负责,选择最合适的方式达到目的地。这需要考虑行车的体感、安全和快捷等因素,通过最优化算法、搜索算法、蒙特卡洛树采样等多种算法来得到未来的驾驶行为,也有通过模仿优秀老司机的驾驶行为等方式来提升驾驶性能等等。

上述4个问题表面上仅仅是车辆端的问题,但是其背后的技术栈是异常庞大复杂的,这些人工智能技术会用到云端的仿真系统、模型训练系统等等。要做好其中任何步骤都是学术界长期以来不断积累而得,也是需要工程能力非常强大的工程师才能实现的高效算法。无人驾驶作为人工智能的一个重大应用方向,不是某一项单一的技术可以实现的,它是一个目前人类技术巅峰的一个整合创新。需要有算法上的创新、系统上的融合以及云平台的支持。
那如此复杂的技术我们应该如何入门,如何进入这个领域?先来看看这一份技能图谱: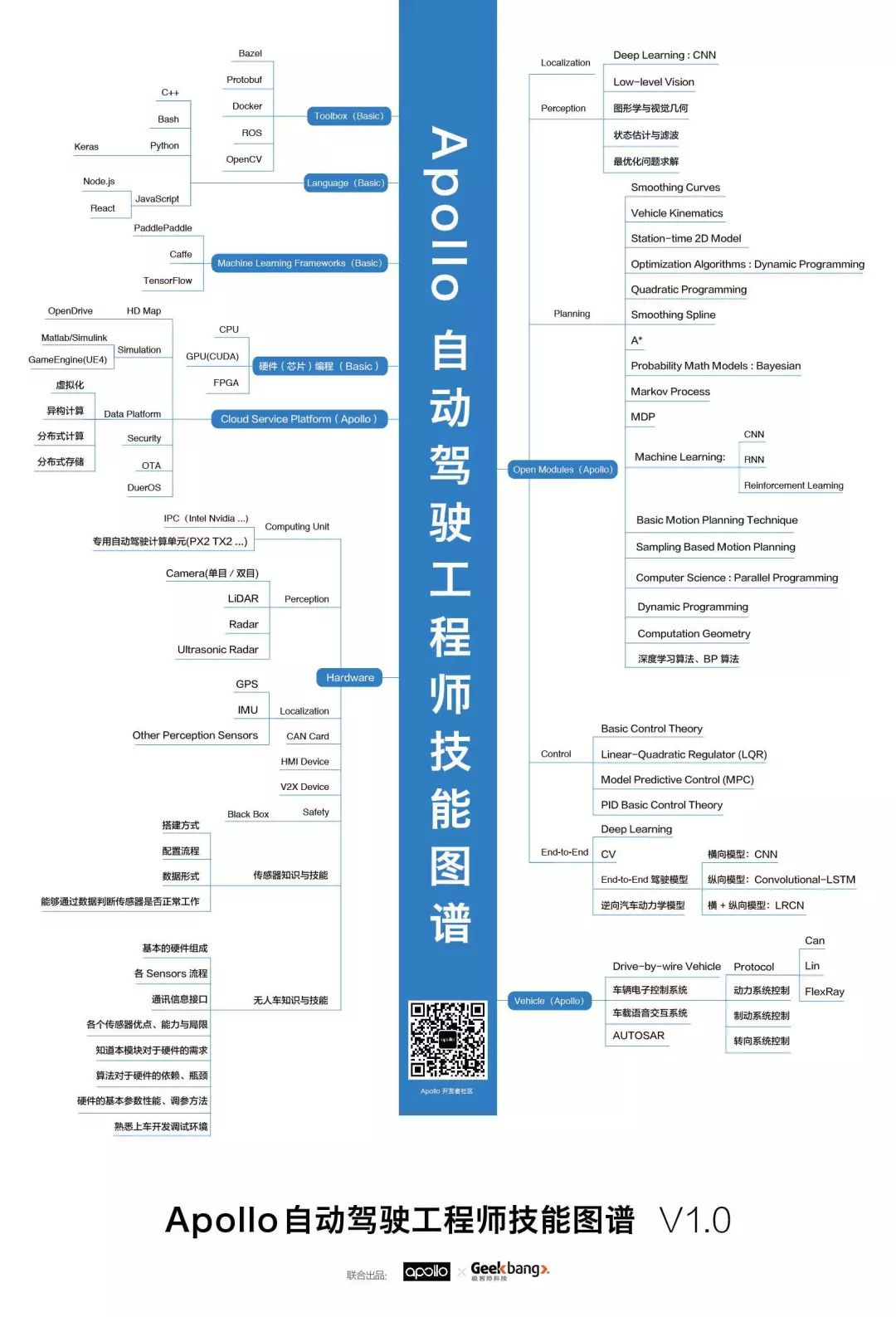
从这份技能图谱可以看到包括两大主要模块,首先是基础层,就是Apollo开发会用到的共性的语言和编程方式;其次是自动驾驶技术层,既包括感知、决策规划、智能控制、End-to-End等自动驾驶核心能力,也包括硬件,比如GPS、雷达、传感器、车辆相关的知识和技能。
三、课程介绍
可,光有一份技能图谱可不够。如果想学习无人驾驶技术从何学起呢,网上相关的资料特别少,特别是L4级全自动驾驶技术,对于七月在线来说,无论大课小课,要么不开,要开就开极致,拒绝任何大会式的演讲,邀请自动驾驶工业界的核心专家,把自动驾驶技术讲深讲透,且首次全面公开L4级别的全自动驾驶技术。
以下是课程的详细介绍:

试看链接:https://pan.baidu.com/s/1GioqGBN1F99_jnT1oE5j4Q?pwd=g11i
相关推荐:
睿慕课 Autoware自动驾驶框架源码剖析与实践
章节目录:
第一阶段 掌握自动驾驶基础
第一课 自动驾驶概述
试听
知识点1: 自动驾驶趋势分析
知识点2: 自动驾驶技术路线图和技术栈
知识点3: 自动驾驶各模块概述
知识点4: 硬件基础:感知传感器(激光雷达、毫米波雷达、超声波、相机)、GNSS系统、工控机、车辆底盘
第二课 软件环境基础(ROS CMake)
知识点1: CMake常用指令与实战案例
知识点2: Docker入门基础
知识点3: ROS基本概念和原理
知识点4: Rviz, Gazebo仿真器
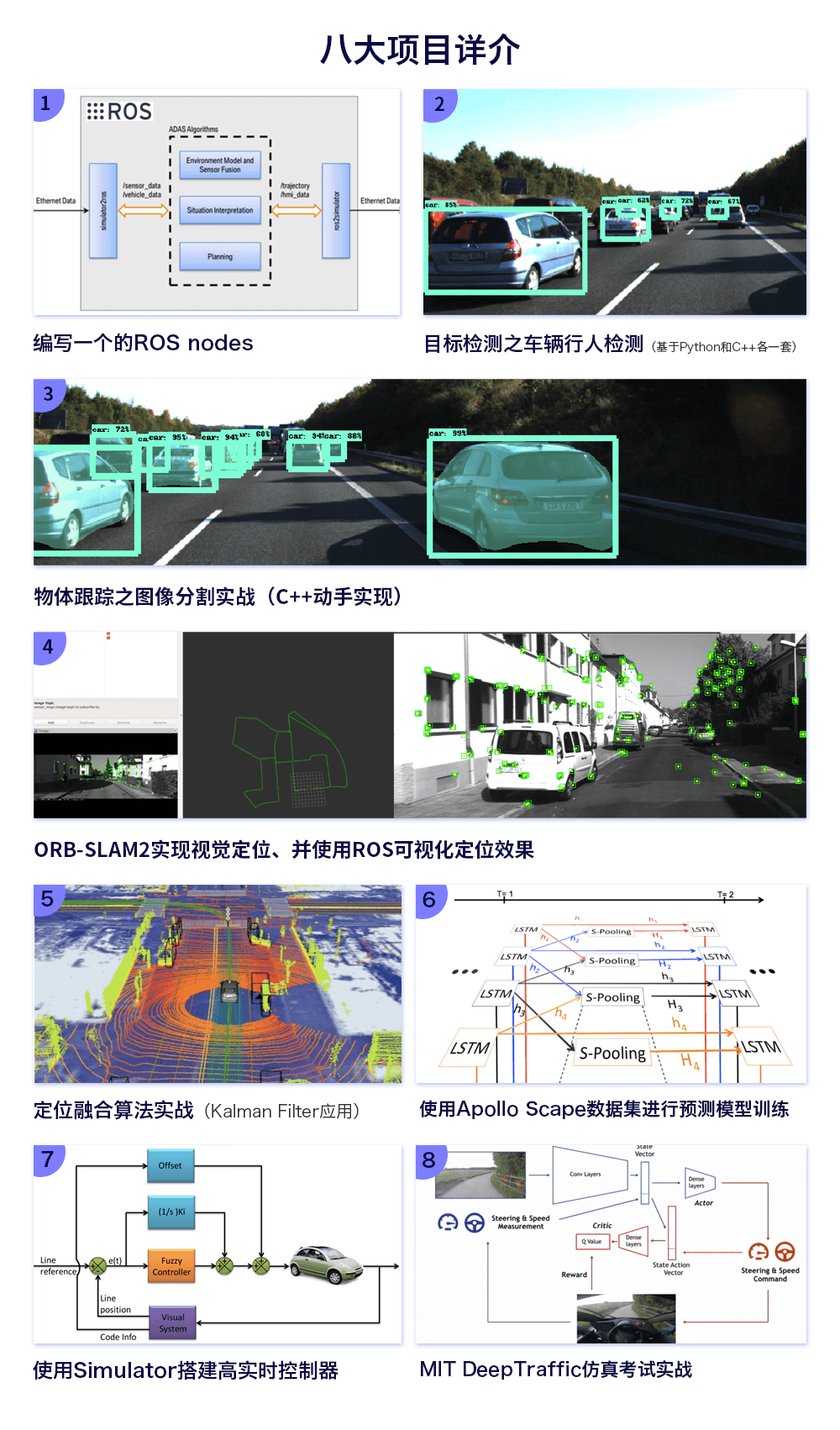
实战项目: 编写一个的ROS nodes
第二阶段 掌握自动驾驶感知能力
第三课 感知基础
知识点1: 各传感器感知(视觉感知 激光雷达 毫米波雷达)
知识点2: 常用检测算法
知识点3: 常用跟踪算法
第四课 感知实战:目标检测
实战项目: 1:车辆行人检测(基于Python):搭建python版本tensorflow环境、运行检测demo并做源码分析(运行瓶颈)、优化检测demo用于目标检测
实战项目: 2:根据python版本改写C++版本:C++版本的必要性、tensorflow架构简介、bazel编译tensorflow C++库、bazel基本介绍、根据python接口编写C++版前向传播接口
第五课 感知实战:物体跟踪
实战项目: 1:加入跟踪算法赋予ID信息
实战项目: 2:加入分割算法获取mask (mask后处理的源码分析及C++动手实现)
实战项目: 3:基于激光雷达数据的感知
第六课 视觉定位
知识点1: 视觉SLAM基本介绍:VO LocalMap LoopClosing
实战项目: 1:ORB-SLAM2实现视觉定位、并使用ROS可视化定位效果
第三阶段 自动驾驶地图和定位系统
第七课 高精地图与车路协同设备
知识点1: 高精地图原理与标准
知识点2: 制图流程
知识点3: V2X设备原理和功能介绍
第八课 无人车定位系统
知识点1: 定位系统的坐标系
知识点2: IMU航迹定位理论
知识点3: GNSS、UWB电子信号定位理论
实战项目: 1:定位融合算法实战(Kalman Filter应用)
第四阶段 决策规划控制系统
第九课 预测系统
知识点1: 预测建模:特征工程、模型选择、后处理
知识点2: RNN模型
知识点3: 行人预测,车辆预测
实战项目: 1:使用Apollo Scape数据集进行预测模型训练
第十课 路径规划
知识点1: 路径规划问题概述
知识点2: 搜索算法原理:A*、DP算法
知识点3: 速度规划与体感优化:QP算法
知识点4: 二维规划算法:Lattice
第十一课 控制理论
知识点1: 车辆底盘介绍:刹车油门结构、线控系统原理、车辆报文
知识点2: 车辆动力学建模
知识点3: 控制器模型设计:PID、最优控制器、模型预测控制
实战项目: 1:使用Simulator搭建高实时控制器
第五阶段 强化学习自动驾驶系统
第十二课 基于强化学习的自动驾驶系统
知识点1: 强化学习原理
知识点2: End2End自动驾驶系统介绍
知识点3: 基于强化学习的路径规划方法
实战项目: 1:MIT DeepTraffic仿真考试实战
声明:本站所有资料均来源于网络以及用户发布,如对资源有争议请联系微信客服我们可以安排下架!



